
メールフォーマットエラー
emailCannotEmpty
emailDoesExist
pwdLetterLimtTip
inconsistentPwd
resetAccountPassword
forTheAccount
pwdLetterLimtTip
inconsistentPwd
resetSuccess
resetSuccessTips
login


Cys Drive Servoを選択して、成功を達成してください!
August 30,2024
Guangdong Supersonic Precision Power Technology Co.、Ltd。は2009年に設立され、「The World…
続きを読む

CYS-S0650ソースからの究極のハイトルクフルメタルサーボ
August 23,2024
Guangdong Supersonic Precision Power Technology…
続きを読む


PB078-010902精密ギアボックスリデューサー:製造業の卓越性へのコミットメント
August 23,2024
製造業の卓越性は、広東スーパーソニック・プリシジョンパワーテクノロジーCo.、Ltd。の単なる目標ではありません。これは、私たちが行うすべてを導く基本原則です。…
続きを読む


還元剤の謎を明らかにする:産業力の賢明な変圧器
August 17,2024
導入
産業の領域の広大な風景の中で、還元剤は不快でありながら不可欠なヒーローのように立っています。
トルクを減速して強化する独自の能力により、それらは安定して提供します
無数の機械装置への堅牢なパワーサポート。今日、私たちは世界を掘り下げましょう
還元剤と産業力のインテリジェントな選択としてそれらがどのように浮上したかを探ります
伝染…
続きを読む

グローバルサーボ市場の分析:専門的な製造とOEMサービスの超音速精密パワーがどのように先導するか
August 13,2024
そのパートナーです。高度な製造施設、厳密な品質管理、包括的なOEMサービスにより、私たちはあなたのビジネスがこの競争の激しい状況で成功するのを支援するために完全に位置付けられています。Supersonicが次のプロジェクトを精密なサーボとプロのOEMサービスでどのように駆動できるかについて詳しくは、今すぐお問い合わせください。このダイナミックな風景で極めて重要な役割を果たし、主要なブランドに最高品質のサーボと包括的なOEMサービスの両方を提供します。このブログは、サーボ市場の現在のトレンドを掘り下げており、Supersonicの最先端の生産能力がどのように私たちを競争と区別したかを強調しています。…
続きを読む
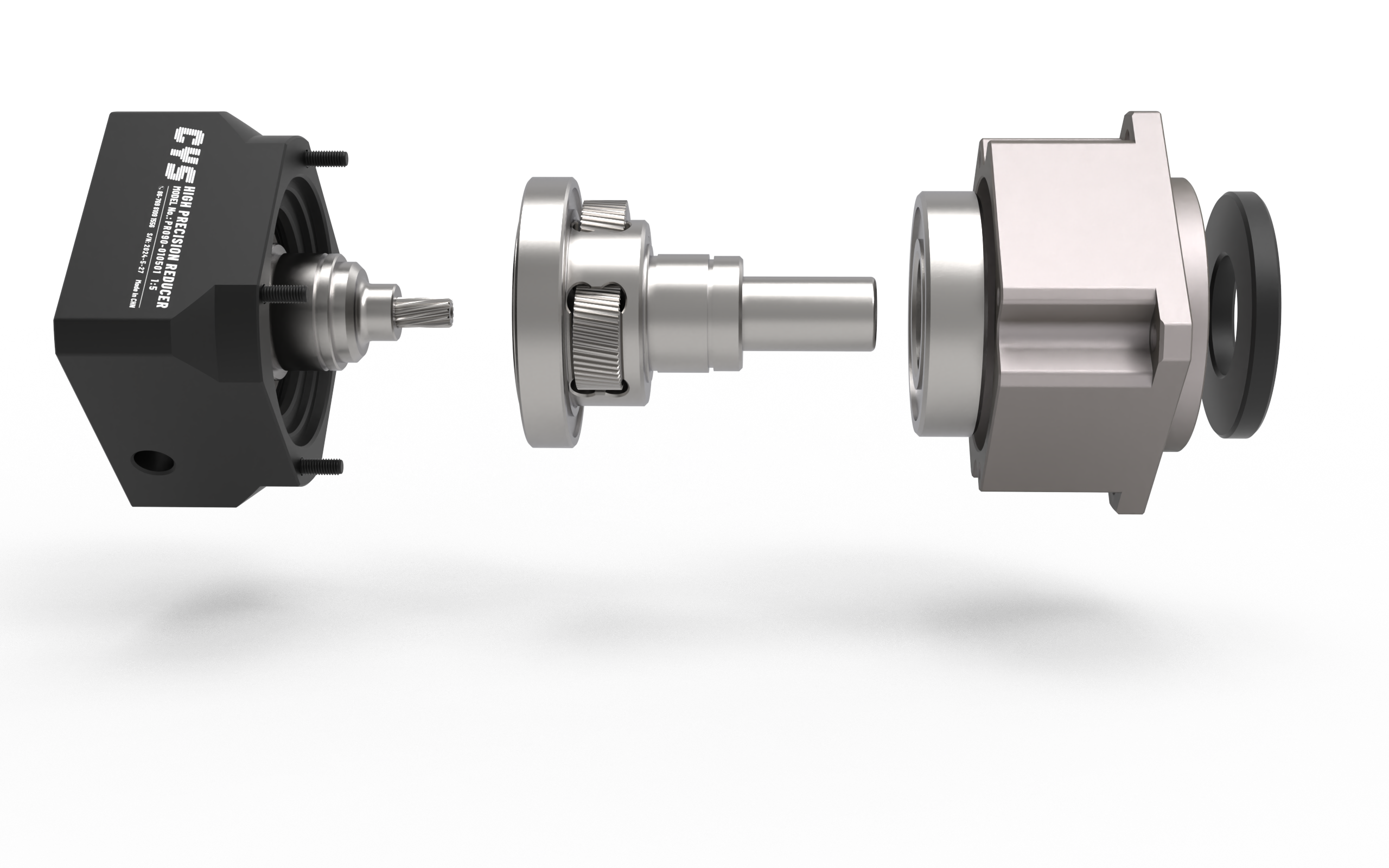
射出成形ロボット用の精密惑星ギアボックスリデューサー:低ノイズ、高効率、カスタムソリューション
August 13,2024
射出成形の競争の激しい世界では、正確で信頼できる自動化コンポーネントの必要性が最も重要です。これらのシステムの中心にあるCYS-PB078-010901惑星ギアボックスリデューサー射出成形ロボットの最大の選択肢として際立っており、低ノイズ、高精度、カスタマイズ可能なオプションで並外れたパフォーマンスを提供します。…
続きを読む

CYS-S6308 CAN Protocol Servo:精密制御のニーズに合わせて汎用性のあるカスタマイズ可能なソリューション
August 08,2024
ロボット工学、ドローン、産業の自動化の世界では、高性能とカスタマイズ可能なコンポーネントの需要が成長し続けています。…
続きを読む
CYSからのPR060-010901惑星還元剤でロボット効率を高める
August 08,2024
ロボット工学と自動化の急速に進化する世界では、信頼性が高く効率的なコンポーネントを持つことが重要です。…
続きを読む

なぜブラシレスサーボを選択する必要があるのですか?
June 03,2024
ブラシレスサーボモーターを選択することは、多くの利点があるため、好ましい選択です。
以下は、ブラシレスサーボモーターの主な理由と利点です。
1.高精度と低ノイズ:
ブラシレスサーボモーターは高精度で有名であり、
動き。
また、ブラシ付きモーターと比較して著しく低いノイズを生成し、理想的にします
ノイズリダクションが重要なアプリケーションの場合。
2.よりグレータートルクと速度:
ブラシレスデザインのおかげで、これらのモーターはより高いトルク出力を実現し、
それらは要求の厳しいアプリケーションに適しています。
さらに、より高い回転速度を提供し、全体的なパフォーマンスを向上させます。
3.ロンガー寿命:
ブラシの必要性を排除することで、ブラシレスサーボモーターは摩耗と涙を大幅に減らし、
寿命が長くなります。
これは、メンテナンスコストの削減と信頼性の向上につながります。
4.エネルギー効率:
ブラシレスモーターは通常、エネルギー効率が高く、より高い割合を変換します
機械的エネルギーへの電気エネルギー。
これにより、消費電力の削減と潜在的なエネルギー節約につながります。
5.デジタルコントロール:
多くのブラシレスサーボモーターはデジタル制御システムを利用しており、優れた精度を提供し、
アナログシステムと比較した応答性。
デジタル制御により、より高度な機能と最適化が可能になり、全体的に強化されます
パフォーマンス。
6.低干渉:
ブラシレスのデザインは、低電磁干渉(EMI)をもたらし、モーターの改善をもたらします
他の電子システムとの互換性。
要約すると、ブラシレスサーボモーターは、高精度、低ノイズなどの利点を提供します。
より大きなトルクと速度、より長い寿命、エネルギー効率、デジタル制御、および低い
干渉。これらの利点により、それらはさまざまなアプリケーションを含む好ましい選択肢になります
しかし、ドローン、ロボット工学、精密機械に限定されません。…
続きを読む

お問い合わせ
製品タグ
お問い合わせ
以下のフォームからお問い合わせください。 24時間以内に返信いたします。