
メールフォーマットエラー
emailCannotEmpty
emailDoesExist
pwdLetterLimtTip
inconsistentPwd
resetAccountPassword
forTheAccount
pwdLetterLimtTip
inconsistentPwd
resetSuccess
resetSuccessTips
login


サーボの特定の鎖
2024-04-29 16:44:08
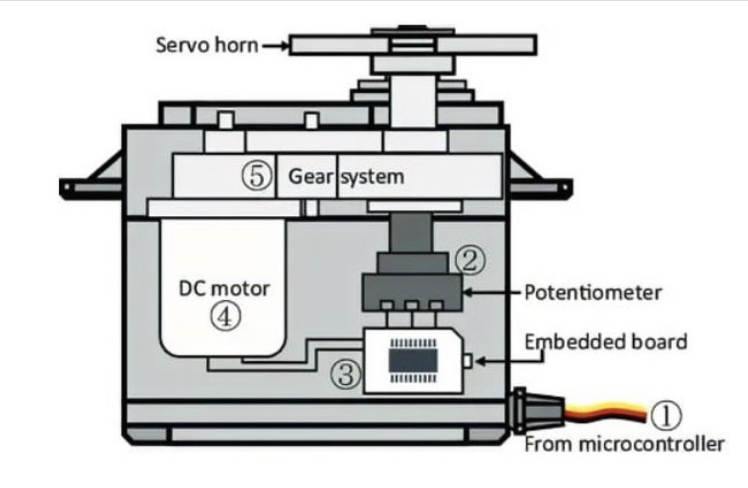
サーボの特定の構造は次のとおりです。
①:信号線:マイクロコントローラーからコントロール信号を受信します。
②:ポテンショメータ:出力シャフトの位置を測定できます。
サーボメカニズム全体のフィードバックパート。
③:内部コントローラー:外部コントロールからの信号を処理し、モーターを駆動し、
フィードバック位置信号を処理することは、サーボメカニズム全体の中核です。
④:モーター:アクチュエータとして、どれだけの速度、トルク、位置が出力されますか。
⑤:伝送メカニズム/サーボシステム:このメカニズムは、
特定の伝送比に応じた最終出力角までのモーター。
サーボの出力は、サーボの信号線にPWM信号を送信することにより制御されます。
①:信号線:マイクロコントローラーからコントロール信号を受信します。
②:ポテンショメータ:出力シャフトの位置を測定できます。
サーボメカニズム全体のフィードバックパート。
③:内部コントローラー:外部コントロールからの信号を処理し、モーターを駆動し、
フィードバック位置信号を処理することは、サーボメカニズム全体の中核です。
④:モーター:アクチュエータとして、どれだけの速度、トルク、位置が出力されますか。
⑤:伝送メカニズム/サーボシステム:このメカニズムは、
特定の伝送比に応じた最終出力角までのモーター。
サーボの出力は、サーボの信号線にPWM信号を送信することにより制御されます。
お問い合わせ
製品タグ
お問い合わせ
以下のフォームからお問い合わせください。 24時間以内に返信いたします。